-
-
-
Tổng tiền thanh toán:
-

Khắc phục sự cố trên Ultimate 2.0
31/05/2024

1. Tại sao robot không hoạt động sau khi bật nguồn? Bo mạch chính đột nhiên khởi động lại khi tôi cố gắng điều khiển động cơ.
Trả lời: Robot STEM có thể hết pin. Do đó, bạn hãy sạc pin hoặc thay pin mới.
Lưu ý: Sử dụng pin có điện trở trong thấp để có thể cung cấp đủ năng lượng cho robot.
Đảm bảo bạn đã tải xuống chương trình hoặc chương trình cơ sở liên quan cho robot. Nếu không, nó sẽ không chạy.
Kiểm tra xem các động cơ trên robot có được nối dây đúng cách hay không.
2. Khi tôi cố gắng xoay robot sang trái, nó sẽ quay sang phải. Tại sao và làm thế nào để khắc phục vấn đề này?
Trả lời: Bạn có thể cần phải thay đổi dây, chuyển đổi hai dây (Cổng 1, Cổng 2) để điều chỉnh hướng quay.
3. Tại sao có tiếng ồn sau khi tôi cho robot chạy?
Trả lời: Để khắc phục vấn đề này, các bạn hãy thực hiện theo hướng dẫn sau:
- Kiểm tra xem các bánh dẫn động đã được lắp đúng chưa.
- Điều chỉnh vòng bi của bánh dẫn động để đảm bảo chúng không quá chặt hoặc quá lỏng.
- Đảm bảo rằng đĩa mã hóa và giao diện của công tắc quang điện được tách biệt với nhau.
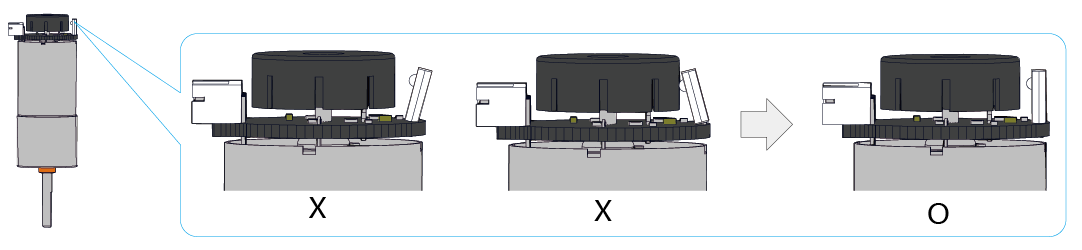
Hướng dẫn cách xử lý khi có tiếng ồn sau khi robot chạy
4. Tôi có thể làm gì nếu không thể kết nối ứng dụng với robot qua Bluetooth?
Trả lời: Để kết nối ứng dụng với robot qua Bluetooth, bạn hãy làm theo hướng dẫn sau:
- Vui lòng kiểm tra xem điện thoại thông minh của bạn có tương thích với ứng dụng không.
- Hãy khởi động lại ứng dụng hoặc đặt lại bảng điều khiển chính trên robot.
- Tiến hành đặt lại chương trình mặc định cho robot của bạn bằng phần mềm mBlock.
5. Tôi nên làm gì nếu robot tự cân bằng của tôi không giữ được thăng bằng?
Khi bạn nhận thấy Ultimate 2.0 - Robot tự cân bằng không thể giữ thăng bằng, vui lòng tham khảo các bước dưới đây để kiểm tra:
- Hãy đảm bảo rằng bạn đã thực hiện đúng theo hướng dẫn để lắp ráp rô-bốt tự cân bằng. Trong gói Ultimate 2.0 có 3 động cơ, nhớ dùng 2 động cơ 9V/185RPM. Dưới đây là video hướng dẫn robot tự cân bằng bao gồm cả video lắp ráp:
- Đảm bảo đủ năng lượng vì robot tự cân bằng cần phải hoạt động hết công suất. Nếu bạn chắc chắn việc lắp ráp đã hoàn hảo nhưng vẫn không cân bằng được, vui lòng lắp 6 viên pin mới vào. Điều này rất quan trọng.
- Đảm bảo mô-đun Gyro hoạt động bình thường. Bạn có thể viết một chương trình đơn giản để kiểm tra mô-đun.
Nếu bạn kiểm tra cả ba mà vẫn không thành công, vui lòng liên hệ với bộ phận Hỗ trợ Kỹ thuật của Makeblock tại service@makeblock.com.








