-
-
-
Tổng tiền thanh toán:
-

Trường hợp 23 - Kiểm soát tốc độ quay
16/07/2024
Phần 1: Mục tiêu
Sau khi bạn tải chương trình lên, bạn có thể điều khiển tốc độ quay và hướng quay của động cơ được kết nối với Cổng EM2 bằng cách xoay động cơ được kết nối với Cổng EM1.
Xoay động cơ kết nối với cổng EM1 để điều khiển tốc độ quay và hướng quay của động cơ kết nối với cổng EM2
Phần 2: Chuẩn bị
- Cửa bảo vệ CyberPi (đã bật nguồn) x 1
- Động cơ mã hóa lắp trên bánh xe x 2
- Cáp động cơ x 2
- Cáp USB (Loại C) x 1
- Máy tính có kết nối mạng x 1
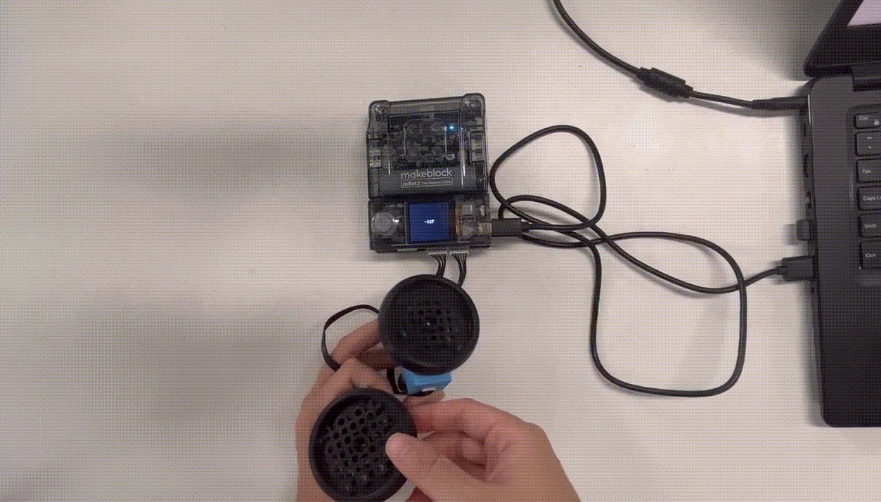
Cài đặt các bộ phận trên, kết nối CyberPi với máy tính bằng cáp, mở mBlock 5 (máy khách PC hoặc phiên bản web), kết nối CyberPi và chọn chế độ Tải lên (Upload).
Kết nối máy tính với CyberPi bằng cáp USB
Thực hiện kết nối CyberPi trên mBlock 5
Phần 3: Lập trình
Thêm lá chắn mBot 2/ MBot Neo từ Trung tâm mở rộng, sau đó lập trình bằng các khối đã thêm vào.
Lập trình các khối đã thêm lá chắn mBot 2 từ Trung tâm mở rộng
Phần 4: Thực hành
Thử lập trình với các khối liên quan đến động cơ khác.








