-
-
-
Tổng tiền thanh toán:
-

Trường hợp 4 - Phát hiện va chạm bằng cảm biến va chạm
08/08/2024
Phần 1: Mục tiêu
Sau khi bạn tải chương trình lên, đèn LED RGB trên mô-đun RGB được kết nối với chân A13 trên MegaPi sẽ sáng khi cảm biến va chạm được kết nối với chân A11 phát hiện va chạm và đèn LED RGB sẽ tắt khi cảm biến va chạm không phát hiện va chạm.
Đèn LED RGB sẽ sáng khi cảm biến va phạm phát hiện va chạm và ngược lại
Phần 2: Chuẩn bị
- MegaPi x 1
- Mô-đun RGB x 1
- Cảm biến va chạm x 1
- Jun 3 chân x 2
- Cáp USB x 1
- Máy tính có kết nối mạng x 1
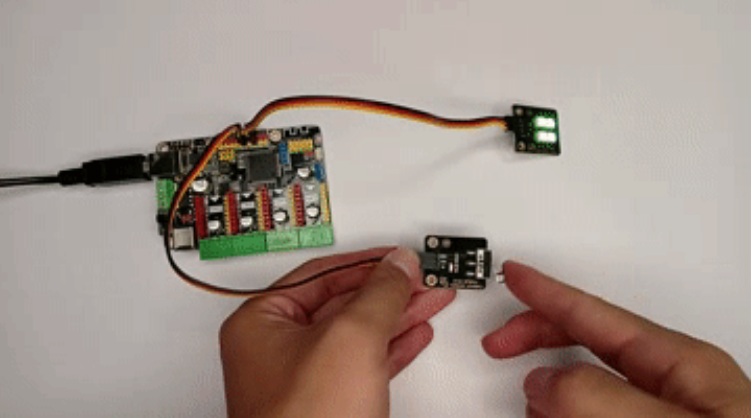
Kết nối MegaPi với máy tính bằng cáp, kết nối cảm biến va chạm và mô-đun RGB với MegaPi tương ứng bằng cách sử dụng Jumper. Mở mBlock 5 (máy khách PC hoặc phiên bản web), nhấp vào +add, chọn mBot Mega từ Thư viện thiết bị (Device Library), nhấp vào Kết nối (Connect) và chọn chế độ Tải lên (Upload).
Sử dụng Jumper kết nối cảm biến va chạm và mô-đun RGB với MegaPi
Mở mBlock 5 và tiến hành các thao tác kết nối
Phần 3: Lập trình
Khi cảm biến va chạm phát hiện va chạm, đèn LED RGB sẽ bật. Nếu không, đèn LED RGB sẽ tắt.
Đèn LED RGB sẽ bật khi cảm biến va chạm phát hiện va chạm và ngược lại
Phần 4: Thực hành
1. Hãy thử viết một chương trình mà đèn LED RGB tắt khi cảm biến va chạm phát hiện va chạm và đèn LED RGB bật khi cảm biến va chạm không phát hiện va chạm.
2. Khi bạn bật mBot Mega, số đèn LED RGB sáng lên bằng số lần cảm biến va chạm phát hiện va chạm.








