-
-
-
Tổng tiền thanh toán:
-

Cách sử dụng mBot Mega
08/08/2024

1.Chức năng mặc định
Vui lòng kết nối với máy tính trước khi sử dụng và cập nhật chương trình cơ sở trong mblock.
Tải xuống mlink:
Tiến hành thao tác tải xuống mlink
2.Sử dụng mblock
3.Kết nối mbot Mega và nâng cấp chương trình cơ sở
Chương trình cơ sở được chia thành hai chương trình: Chương trình cơ sở trực tuyến và Chương trình cơ sở gốc, sự khác biệt giữa hai chương trình này là:
- Chương trình cơ sở trực tuyến
Xóa các quy trình của nhà máy. Ở chế độ lập trình trực tuyến hoặc khi sử dụng APP để điều khiển mBot Mega từ xa, nên chọn chương trình cơ sở này để tránh ảnh hưởng đến các chương trình tùy chỉnh.
- Chương trình cơ sở gốc
Khôi phục chương trình gốc (khôi phục chức năng nhận dạng cử chỉ, tránh chướng ngại vật, theo dõi đường). Ở chế độ này, cảm biến phải được lắp đặt vào vị trí giao diện đã chỉ định theo hướng dẫn của sách hướng dẫn, nếu không cảm biến sẽ bị kích hoạt nhầm và gây ra trục trặc.
Tiến hành kết nối mbot Mega và nâng cấp chương trình cơ sở
Vui lòng lắp pin có đủ điện vào hộp pin trước khi sử dụng, sau đó bật công tắc nguồn của Megapi, nếu không động cơ sẽ không khởi động.
4.Chuyển đổi chức năng
- Nhấn 2 giây để công tắc va chạm thay đổi các chức năng cài đặt trước khác nhau. Màu khác nhau của đèn RGB biểu thị các chức năng cài đặt trước khác nhau.
5.Nhận dạng cử chỉ: chức năng mặc định khi khởi động
- Màu đèn: xanh lá cây
- Trạng thái chờ: Cả hai mô-đun RGB đều có màu xanh lá cây yếu: R0G80B0
- Khi cảm biến tránh chướng ngại vật phát hiện chướng ngại vật, mô-đun RGB sẽ chuyển sang màu xanh lá cây nổi bật: G255
- 3 mô-đun tránh chướng ngại vật lắp ráp ở mặt trước có thể phát hiện ba trạng thái trong phạm vi 3-10cm:
- Khi vuốt sang phải: Trong vòng N giây, khi cảm biến tránh chướng ngại vật 1, 2 và 3 lần lượt phát hiện tín hiệu, rô-bốt sẽ di chuyển khoảng 10cm về bên phải. Khi di chuyển, đèn RGB ở phía bên phải sáng lên thành G255 và khi dừng lại, đèn sẽ trở về G80.
- Khi vuốt sang trái: Trong vòng N giây, khi các cảm biến tránh chướng ngại vật 3, 2 và 1 lần lượt phát hiện tín hiệu, robot sẽ di chuyển khoảng 10cm sang trái. Khi di chuyển, đèn RGB ở phía bên trái sáng lên thành G255 và khi dừng lại, đèn sẽ trở về G80.
- Đẩy: Khi cảm biến tránh chướng ngại vật số 3 phát hiện tín hiệu cùng lúc trong hơn 0,2 giây, thì được coi là cử chỉ đẩy, đèn RGB bên trái và bên phải sáng cùng lúc với G255 và robot sẽ di chuyển lùi. Dừng di chuyển khi tất cả các cảm biến không phát hiện được tín hiệu và đèn RGB trở về G80.
6.Tự động tránh chướng ngại vật
- Màu đèn: vàng
- Khi không phát hiện chướng ngại vật, tất cả đèn đều có màu vàng yếu: R80G80B0
- Khi bất kỳ cảm biến hồng ngoại nào phát hiện chướng ngại vật, tất cả đèn đều sáng màu vàng: R255G255B0
- Sau khi chuyển sang chế độ tự động tránh chướng ngại vật, nó di chuyển theo trạng thái của ba cảm biến:
- Tiến: Di chuyển về phía trước khi không có cảm biến nào trong ba cảm biến phát hiện chướng ngại vật.
- Rẽ trái: Khi cảm biến bên trái phát hiện chướng ngại vật, nó quay theo chiều kim đồng hồ khoảng 90 độ tại chỗ.
- Rẽ phải: Khi cảm biến bên phải phát hiện chướng ngại vật, nó quay khoảng 90 độ ngược chiều kim đồng hồ tại chỗ.
- Lùi: Khi cảm biến ở giữa phát hiện chướng ngại vật, lùi lại khoảng 5cm.
7.Tự động theo dõi đường:
- Màu đèn: xanh lam
- Khi cảm biến theo dõi đường không phát hiện đường đen, độ sáng đèn RGB là xanh lam yếu: R0G0B80
- Khi cảm biến theo dõi đường phát hiện màu đen, đèn RGB ở phía tương ứng có màu xanh lam: R0G0B255
- Sau khi chuyển sang chế độ theo dõi đường, bất kỳ cảm biến theo dõi đường nào cũng phát hiện ra màu đen, sau đó bắt đầu theo dõi đường. Nếu hai cảm biến theo dõi đường không phát hiện ra màu đen, hãy xoay tại chỗ trong 5 giây, cho đến khi phát hiện ra màu đen và sau đó bắt đầu theo dõi đường. Nếu màu đen vẫn không được phát hiện sau 5 giây, Mega sẽ dừng chuyển động và đợi đường đen được phát hiện lại, sau đó bắt đầu tuần tra đường (chờ để di chuyển thủ công đến đường đen).
8.Lập trình
Arduino
Tải xuống tệp thư viện: Tệp Libray
Bao gồm thư viện
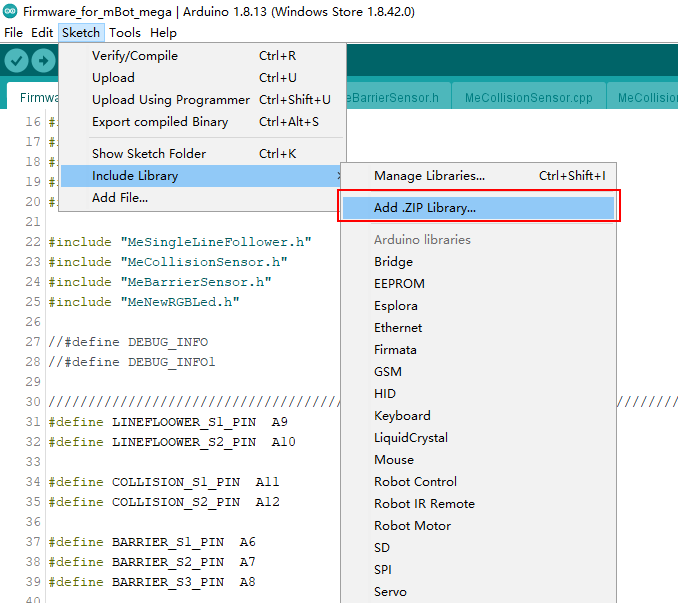
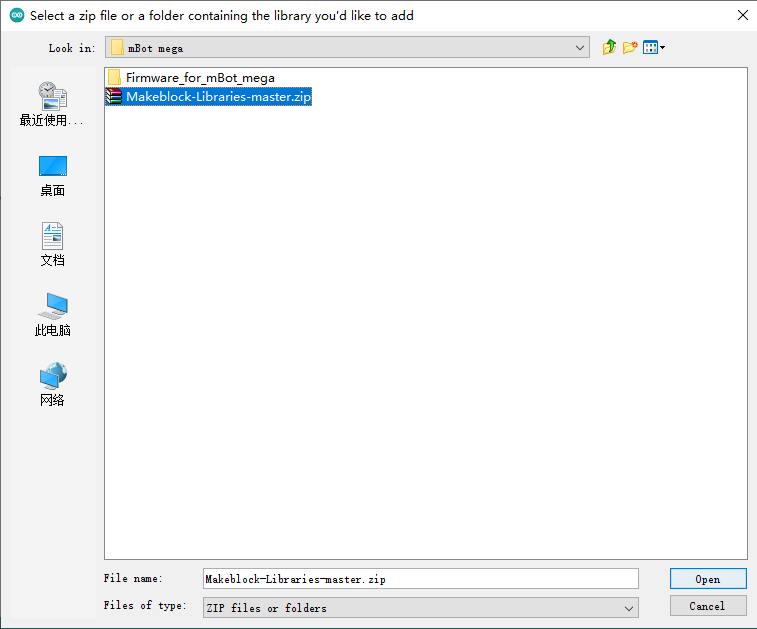
Tiến hành tải tệp Libray và giải nén tệp
mBlock
Bắt đầu lập trình và tải chương trình lên.
Tiến hành lập trình và tải chương trình lên mBlock
Về các khối mblock
Mô tả khối câu lệnh điều khiển di chuyển:
Phạm vi giá trị tốc độ di chuyển là -100~100 và số âm có nghĩa là chuyển động ngược. Có thể sử dụng các biến.
-Cung cấp cho tất cả các động cơ cùng một tốc độ tại cùng một thời điểm:

- Thiết lập tốc độ di chuyển của mBot Mega theo hướng trục X và Y, cũng như hướng và tốc độ quay.
- Cài đặt tốc độ di chuyển của mBot Mega theo hướng tiến, lùi, trái và phải.
- Cài đặt tốc độ của một động cơ duy nhất.
- Cài đặt tốc độ của hai động cơ cùng một lúc.
Ensor câu mô tả khối
- Cảm biến mặc định trong bộ mBot mega chỉ định vị trí giao diện. Nếu kết nối không đúng, nó sẽ không phản hồi trong quá trình lập trình. Lập trình trong Arduino IDE không bị giới hạn bởi vị trí của giao diện.
- Cảm biến va chạm (công tắc giới hạn)
- Cảm biến theo dõi đường thẳng (điều kiện kích hoạt mặc định: kích hoạt khi bề mặt cách máy phát 2-20mm và có thể phản xạ ánh sáng hồng ngoại, được đánh giá là "trắng", nếu không được đánh giá là "đen". Hầu hết các bề mặt vật thể tối sẽ hấp thụ tia hồng ngoại. Không thể kích hoạt cảm biến theo dõi đường thẳng; bề mặt của hầu hết các vật thể sáng màu có thể phản xạ tia hồng ngoại.)
- Cảm biến tiệm cận IR (điều kiện kích hoạt mặc định: kích hoạt khi vật thể cách đầu phát khoảng 30mm. Giới hạn trên của khoảng cách phát hiện có thể thay đổi bằng cách điều chỉnh biến trở và khoảng cách phát hiện tăng lên khi xoay ngược chiều kim đồng hồ. Nhưng mức độ hấp thụ ánh sáng hồng ngoại trên bề mặt vật thể, độ phẳng, diện tích và các yếu tố khác. Vật liệu hấp thụ ánh sáng hồng ngoại sẽ không thể kích hoạt cảm biến tiệm cận IR, chẳng hạn như hầu hết các vật thể màu đen.)
Khối lệnh đèn RGB
- Kiểm soát màu sắc của tất cả đèn LED trên một mô-đun đèn RGB duy nhất
- Kiểm soát màu sắc của đèn LED được chỉ định trên một mô-đun đèn RGB duy nhất và kiểm soát tất cả đèn LED khi số sê-ri đèn LED là 0. Có thể sử dụng biến làm giá trị.
- Kiểm soát màu sắc của đèn LED được chỉ định trên một mô-đun đèn RGB duy nhất bằng các giá trị RGB. Kiểm soát tất cả đèn LED khi số đèn LED bằng 0. Phạm vi giá trị RGB là 0-255 và có thể sử dụng các biến.

- Kiểm soát màu sắc của tất cả đèn LED trên mô-đun đèn RGB bằng các giá trị RGB. Có thể sử dụng các biến cho các giá trị.

- Tắt đèn LED ở vị trí được chỉ định trên mô-đun chiếu sáng RGB. Khi giá trị là 0, tất cả đèn LED đều tắt. Có thể sử dụng biến cho giá trị này.
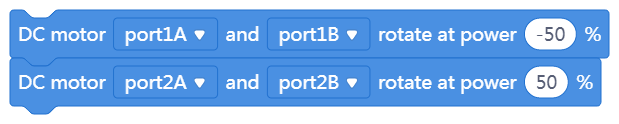
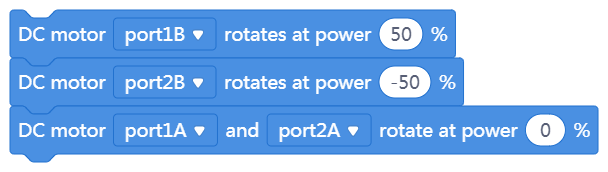
9.Ví dụ về điều khiển chuyển động
Điều khiển tốc độ và hướng quay của 4 động cơ riêng biệt, có thể kết hợp nhiều phương pháp chuyển động khác nhau.
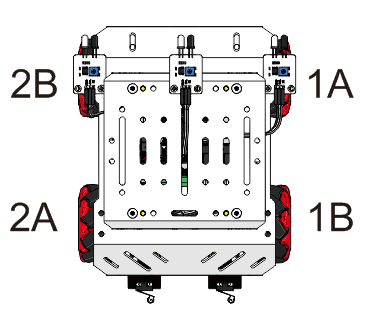
Chuyển động tuyến tính
Phía trước:
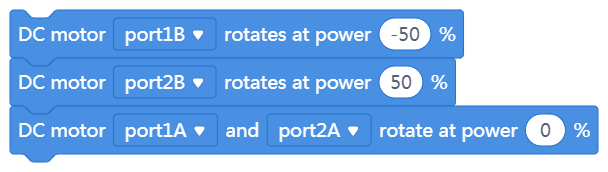
Lùi lại:
Bên trái:
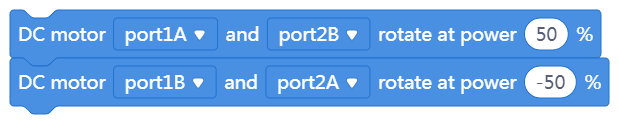
Bên phải:
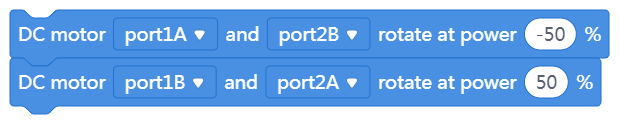
Phía trên bên trái:
Phía dưới bên phải:

Phía trên bên phải:
Phía dưới bên trái:
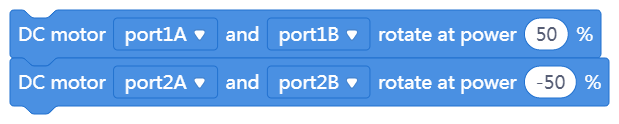
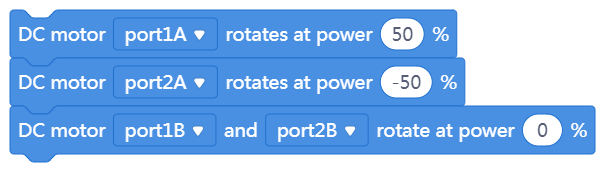
Xoay:
Theo chiều kim đồng hồ:

Ngược chiều kim đồng hồ: