-
-
-
Tổng tiền thanh toán:
-

Giới thiệu về MegaPi mbot Mega
08/08/2024

1. Tổng quan MegaPi mbot Mega
MegaPi là bo mạch điều khiển chính được thiết kế đặc biệt cho các nhà sản xuất và cũng là lựa chọn lý tưởng để áp dụng cho lĩnh vực giáo dục và mọi loại trận đấu. Nó dựa trên Arduino MEGA 2560 và hỗ trợ lập trình với Arduino IDE một cách hoàn hảo.
MegaPi có thể được chia thành 6 vùng chức năng, cho phép bạn kết nối với nhiều mô-đun cắm thêm khác nhau. Nhiệm vụ chính là để điều khiển động cơ, cảm biến và thực hiện giao tiếp không dây.
MegaPi có khả năng điều khiển động cơ mạnh mẽ, có thể điều khiển 10 servo hoặc 8 động cơ DC cùng lúc. Đây là lựa chọn lý tưởng cho nhiều dự án rô-bốt khác nhau, chẳng hạn như xe rô-bốt thông minh và máy in 3D.
2. Tính năng MegaPi mbot Mega
- Bốn giao diện trình điều khiển động cơ để thêm trình điều khiển động cơ mã hóa và trình điều khiển động cơ bước. Do đó điều khiển động cơ DC, động cơ mã hóa và động cơ bước.
- Một giao diện giao tiếp không dây để thêm mô-đun Bluetooth hoặc mô-đun 2.4G.
- Mười giao diện servo cho phép bo mạch điều khiển tối đa 10 servo cùng một lúc.
- Hai giao diện trình điều khiển MOS công suất cao, có thể điều khiển các thiết bị có dòng điện tối đa 10A. Đầu ra tối đa của cổng I/O thông thường là DC 5V 3A.
- Một giao diện công tắc Raspberry Pi (yêu cầu hàn thủ công) để thực hiện giao tiếp nối tiếp 5V đến 3,3V.
- Ba lỗ gắn M4 cho phép bo mạch được kết nối với Raspberry Pi.
- Công tắc trượt để điều khiển nguồn điện.
- Giao diện USB loại B để tải xuống chương trình và giao tiếp. Nó sử dụng chip CH340G USB to serial có thể thực hiện giao tiếp giữa máy tính và MegaPi một cách dễ dàng, ổn định.
- Giao diện đầu vào DC công suất cao với bảo vệ quá dòng 2A và đo ngược.
- Một phím reset, một đèn báo nguồn (màu đỏ) và một đèn báo I/O (màu xanh).
3. Thông số kỹ thuật MegaPi mbot Mega
- Vi điều khiển: ATMEGA2560-16AU
- Điện áp đầu vào: DC 6V-12V
- Điện áp hoạt động: DC 5V
- Chân I/O: 43
- Cổng nối tiếp: 3
- Giao diện I2C: 1
- Giao diện SPI: 1
- Chân đầu vào Analog: 15
- Dòng điện DC trên mỗi chân I/O: 20mA
- Bộ nhớ Flash: 256KB
- SRAM: 8KB
- EEPROM: 4KB
- Tốc độ xung nhịp: 16 MHz
- Kích thước: 85*63mm
4. Giao diện của MegaPi và các mô-đun cắm thêm khác
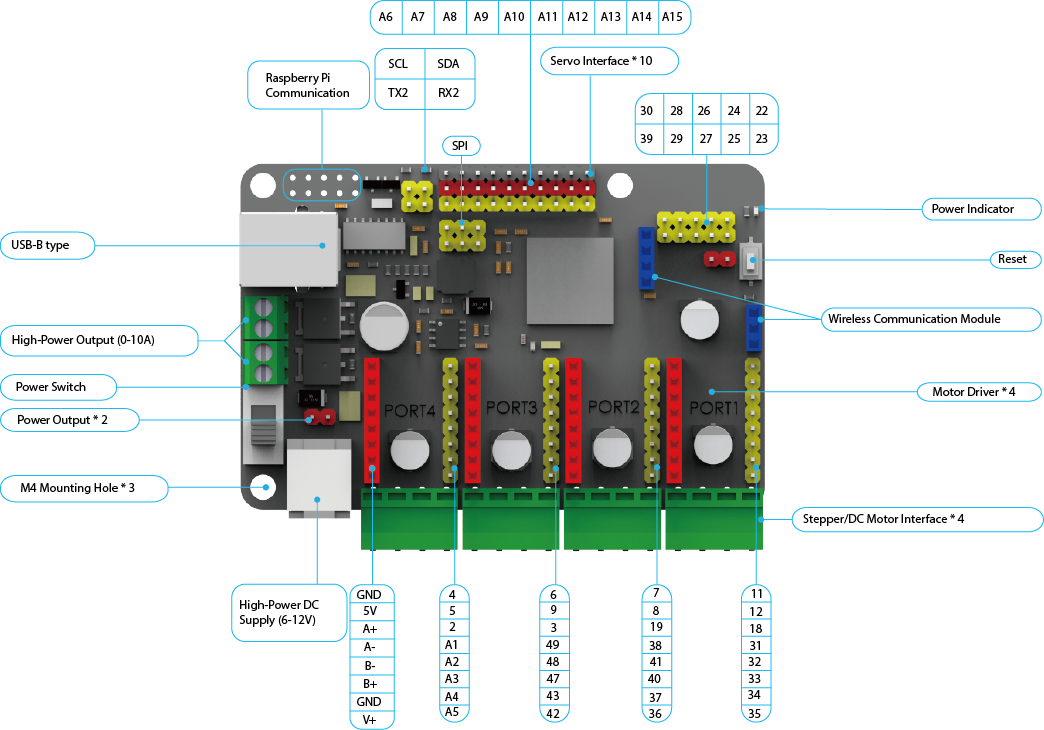
Giao diện của MegaPi cùng những mô-đun khác được cắm thêm
Các màu khác nhau trên MegaPi biểu thị các chức năng chuyên biệt:
- Chân đỏ–đầu ra nguồn/đầu ra động cơ
- Chân vàng–chân I/O
- Chân xanh–giao diện truyền thông không dây
- Chân đen–nguồn GND
- Giao diện xanh lá cây–đầu ra nguồn/đầu ra động cơ
5. Giới thiệu về cổng MegaPi mbot Mega
MegaPi cho RJ 25 cung cấp bốn cổng RJ25 được xác định bằng nhãn có năm màu khác nhau. Màu sắc và chức năng của chúng như sau:
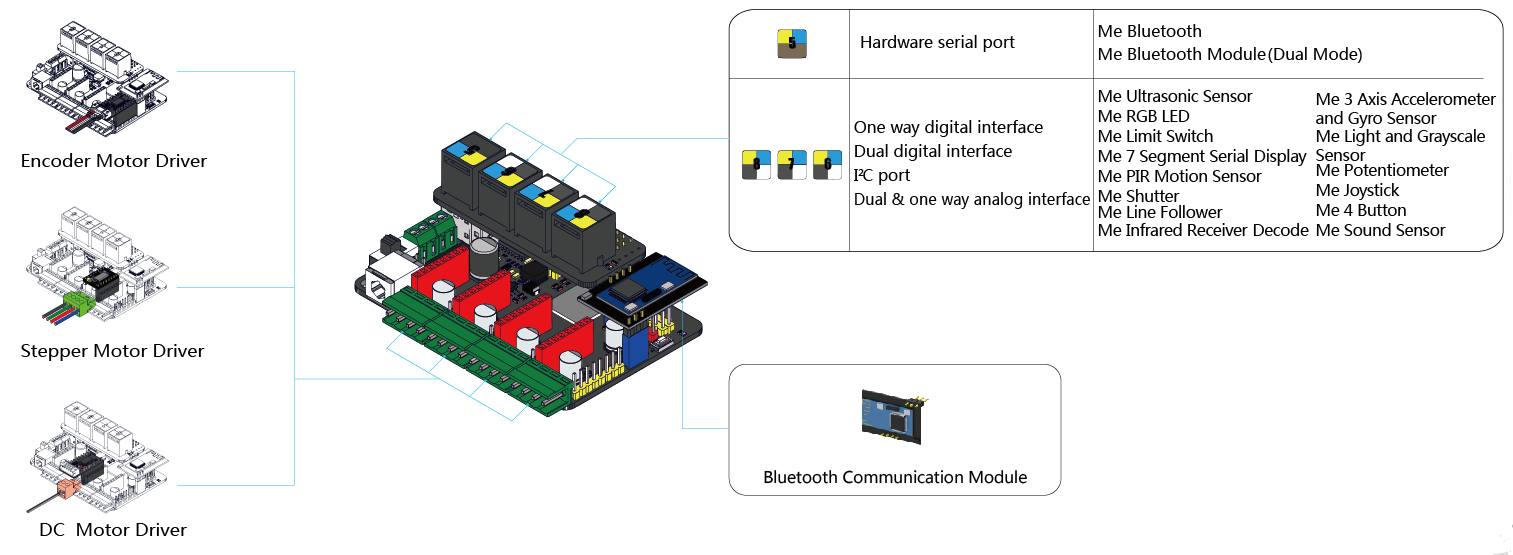
Bốn cổng RJ25 với màu sắc và chức năng cụ thể
- Giao diện truyền thông không dây – để thêm mô-đun Bluetooth hoặc mô-đun 2.4G (yêu cầu mô-đun truyền thông tương ứng)
- Cổng 1 – giao diện trình điều khiển động cơ để điều khiển động cơ DC, động cơ bước và động cơ mã hóa (yêu cầu mô-đun truyền thông tương ứng)
- Cổng 2 – giao diện trình điều khiển động cơ để điều khiển động cơ DC, động cơ bước và động cơ mã hóa (yêu cầu mô-đun truyền thông tương ứng)
- Cổng 3 – giao diện trình điều khiển động cơ để điều khiển động cơ DC, động cơ bước và động cơ mã hóa (yêu cầu mô-đun truyền thông tương ứng)
- Cổng 4 – giao diện trình điều khiển động cơ để điều khiển động cơ DC, động cơ bước và động cơ mã hóa (yêu cầu mô-đun truyền thông tương ứng)
- Cổng 5 – giao diện mô-đun truyền thông RJ25 để thêm Bluetooth hoặc WIFI yêu cầu RJ25 (yêu cầu bộ khóa để chuyển MegaPi sang RJ25)
- Cổng 6 – giao diện kỹ thuật số/tương tự kép RJ25 để thêm cảm biến hoặc mô-đun đầu vào/đầu ra RJ25 (yêu cầu bộ khóa để chuyển MegaPi sang RJ25)
- Cổng 7 – giao diện kỹ thuật số/tương tự kép RJ25 để thêm cảm biến hoặc mô-đun đầu vào/đầu ra RJ25 (yêu cầu bộ khóa để MegaPi đang chuyển sang RJ25)
- Port8– Giao diện kỹ thuật số/tương tự kép RJ25 để thêm cảm biến hoặc mô-đun đầu vào/đầu ra RJ25 (yêu cầu bộ khóa để chuyển MegaPi sang RJ25)
6. Hướng dẫn lập trình MegaPi mbot Mega
1. Lập trình Scratch với mBlock 5
Arduino là một nền tảng điện tử nguồn mở dựa trên phần cứng và phần mềm dễ sử dụng. Nó dành cho bất kỳ ai thực hiện các dự án tương tác. Môi trường phát triển Arduino giúp bạn dễ dàng viết mã và tải lên bảng i/o. Bạn có thể sử dụng ngôn ngữ Arduino (C\C++) để giao tiếp với phần cứng Arduino. Chúng tôi cung cấp một môi trường sử dụng Arduino hoàn chỉnh.
MegaPi tương thích với Arduino Mega 2560, vì vậy bạn có thể phát triển chương trình bằng Arduino IDE. Chúng tôi khuyên bạn nên cài đặt thư viện chương trình Makeblock nếu sử dụng các mô-đun điện tử của Makeblock.

Hướng dẫn cách lập trình MegaPi mbot Mega
7. Sơ đồ MegaPi mbot Mega
Sơ đồ MegaPi 1
Sơ đồ MegaPi 2
8. Câu hỏi thường gặp về MegaPi
8.1 Nếu máy tính không tự động cài đặt được thì lấy gói trình điều khiển ở đâu?
A: Cài đặt trình điều khiển thủ công
8.2 Tại sao Port1 – Port4 của MegaPi lại chống đảo ngược?
A: Port1 – Port4 của MegaPi được thiết kế thành một hàng chân cắm cái hoặc chân cắm đực, và chúng được chia thành màu đỏ hoặc vàng, có thể tránh kết nối ngược. Cổng màu đỏ dành cho đầu vào/ra của dòng điện lớn, trong khi cổng màu vàng dành cho chân I/O. Chip chính hoặc mô-đun trình điều khiển có thể bị cháy nếu bạn kết nối ngược chúng.
8.3 Giao diện trình điều khiển dòng điện lớn (giao diện trình điều khiển MOS) có thể xuất ra bao nhiêu dòng điện?
A: Hai giao diện có thể xuất ra dòng điện lên đến DC12V10A.
8.4 Tại sao động cơ bước bị nóng?
A: Xem xét tình huống sử dụng của động cơ bước, dòng điện của trình điều khiển đã được điều chỉnh thành dòng điện lớn hơn, do đó động cơ có thể bị nóng. Vui lòng tiếp xúc tốt với cánh tản nhiệt và mô-đun trình điều khiển, nếu không chip chính có thể bị cháy.
8.5 Chức năng của biến trở điều chỉnh màu đen trên động cơ bước là gì?
A: Biến trở này dùng để điều chỉnh dòng điện của trình điều khiển động cơ bước. Vị trí mặc định là ở giữa, nhưng bạn có thể vặn lên hoặc xuống. Khi biến trở vặn lên, chip sẽ nóng hơn. Vì vậy, hãy nhớ tản nhiệt bằng chân làm mát lớn hơn hoặc trong điều kiện làm mát tốt.
8.6 Tại sao chip chính lại đặt lại khi MegaPi điều khiển nhiều động cơ cùng lúc? Làm thế nào để xử lý vấn đề này?
A: Khi động cơ bắt đầu chạy hoặc quay theo chiều kim đồng hồ/ngược chiều kim đồng hồ, mức tiêu thụ điện năng sẽ rất lớn. Trong trường hợp này, dòng điện từ nguồn điện sẽ không đủ, dẫn đến điện áp thấp và chip chính bị đặt lại. Bạn nên sử dụng nguồn điện mạnh hơn hoặc điều chỉnh chương trình để tránh động cơ quay theo chiều kim đồng hồ/ngược chiều kim đồng hồ thường xuyên.
8.7 Làm thế nào để hàn đầu cắm 2*10 chân khi kết nối MegaPi với Raspberry Pi?
A: MegaPi không được hàn vào Raspberry Pi, vì vậy bạn phải tự hàn. Tránh đoản mạch khi hàn chân.
8.8 Raspberry Pi sẽ reset khi được kết nối với Raspberry Pi và điều khiển thiết bị công suất cao. Làm thế nào để xử lý vấn đề này?
Khi cấp nguồn cho Raspberry Pi thông qua MegaPi và điều khiển động cơ cùng lúc, điện áp sẽ không ổn định và Raspberry Pi sẽ reset. Chỉ cần cấp nguồn trực tiếp cho Raspberry Pi.
8.9 Làm thế nào để nhận được dịch vụ sau bán hàng nếu có vấn đề về chất lượng với MegaPi?
A: lananh5cvietnam@gmail.com
8.10 Có phụ kiện nào có thể hoạt động với MegaPi không? Tôi nên mua chúng ở đâu?
A: Bộ điều khiển động cơ mã hóa, bộ điều khiển động cơ bước, Bluetooth, 2.4G, động cơ DC, động cơ mã hóa, động cơ bước, Shield, cảm biến của RJ25, động cơ lái, các bộ phận kết cấu, v.v.
9. Lưu ý khi sử dụng MegaPi mbot Mega
- Áp dụng điện áp MegaPi DC 6–12 V
- Ngăn ngừa đoản mạch.
- Ngăn ngừa ô nhiễm nước, chất lỏng có tính axit/kiềm hoặc mảnh vụn rắn, v.v.
- Để xa tầm tay trẻ em và vật nuôi
- Không vứt bỏ bừa bãi khi bị hỏng hóc hay gặp sự cố, vấn đề.








